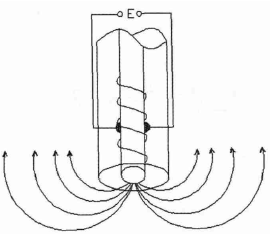
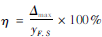
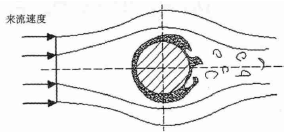
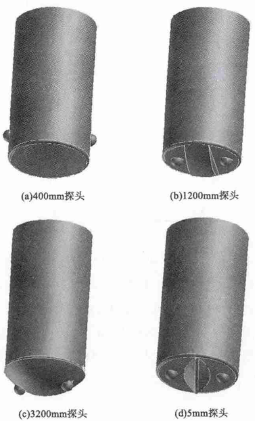
1 plug-in electromagnetic flow meter working principle Plug-in electromagnetic flowmeter measuring principle is based on Faraday's law of electromagnetic induction Among them, E is the induced electromotive force generated between the two electrodes, B is the magnetic induction intensity, L is the effective length of the cutting magnetic induction line, ç‹v is the average flow rate, and the fluid is the conductive medium. The schematic diagram is shown in FIG. 1 . Figure 1 plug-in electromagnetic flowmeter schematic And (1) can be expressed as When both B and L are constant, as long as the induced electromotive force E is measured, the average flow rate can be obtained. Among them, D is the inner diameter of the measured pipe, Qv is the volume flow. From the formula (3), it can be seen that when the insertion pipe structure is certain, the volumetric flow rate Qv is proportional to the ratio E/B, and is independent of the fluid temperature, density, and pressure inside the pipe. When the magnetic induction B is constant, the volumetric flow rate Qv is proportional to the induced electromotive force E, that is, the volume flow rate and the induced electromotive force are completely linear. 2 sensor linearity assessment Linearity is one of the main static performance indicators of a sensor. It is defined as a measure of whether a test system's output and input system can maintain a normal ratio (linear relationship) as an ideal system. Linearity reflects the degree to which the calibration curve agrees with a given straight line, which is an ideal straight line determined by a certain method. Linearity, also known as nonlinearity, refers to the linearity definition in GB/T18459-2001 "Calculation Method for Primary Static Performance of Sensors": Actual and Backward Travel Actual Mean Characteristic Curve Relative to Reference Line (Line Fit) Deviation, expressed as a percentage of full-scale output. This indicator is usually expressed as a linear error Among them, Δmax is the maximum residual and yF.S is the theoretical full-scale output. This paper uses the least squares method to evaluate the linearity, that is, the fitting straight line is the least squares straight line. The least-squares straight line guarantees that the average of the actual output of the sensor is the minimum of the square of its deviation, that is, the deviation between the result obtained by fitting the straight line and the measured result can be guaranteed to be small and more reliable. By definition, linearity is the degree to which the calibration curve deviates from this least-squares fit line. 4 Plug-in electromagnetic flowmeter causes non-linear phenomenon The plug-in electromagnetic flowmeter is used for punching and inserting in the appropriate position of the pipeline under test to measure the flow of the conductive fluid, and can be taken out under constant flow for cleaning and maintenance, and the operation is very convenient. However, the probe inserted into the pipeline is equivalent to the introduction of a choke device to the flow field of the pipeline. The fluid moves around this probe, as shown in Figure 2. Figure 2 Flow around the probe As fluid flows around the probe, a boundary layer forms on the probe surface due to the presence of viscous forces. As the fluid flows up and down along the curved surface, the thickness of the boundary layer increases. The closer to the wall, the more complicated the flow field changes. The change in the flow field distribution will increase the error between the measured average flow velocity and the actual flow velocity. And when the reverse pressure gradient is large enough, backflow will lead to the separation of the boundary layer, and the formation of wake vortex, that is, the separation of the boundary layer, which will increase the nonlinear phenomenon. That is, the non-linearity between the measured average flow velocity and the incoming flow velocity leads to the destruction of the linear relationship between the induced electromotive force and the measured flow, and the accuracy of the plug-in electromagnetic flowmeter measurement is reduced. There are many factors that affect this linear relationship, mainly the plug-in electromagnetic flowmeter installation angle, insertion depth, probe shape and so on. The effect of mounting angle and insertion depth on the linear relationship between the input and output signals can be eliminated by properly installing the flow meter and calibration experiments. Therefore, the reason for the linearity of the plug-in electromagnetic flow meter studied in this paper is mainly the shape of the probe inserted into the pipe. The influence of different probe shapes on the flow field distribution in the pipe is not the same. 3 Numerical Model Design In this paper, the pre-processing software GAMBIT is used to construct the four common types of plug-in electromagnetic flowmeter probes in engineering, as shown in Figure 3. The inner diameter of the pipe is set to 400mm, the insertion depth is 120mm, the probe radius is 32mm, and the electrode radius is 5mm. 3.1 Turbulence Model The turbulence model in this paper uses the most widely used standard k-ε model in engineering and requires solving the turbulent kinetic energy and its dissipation rate equation. In this model, the transport equations for the turbulent kinetic energy k and the dissipation rate ε are as follows Figure 3 four kinds of probe shape Among them, the turbulent viscosity coefficient 3.2 Grid Division The GAMBIT software is used to mesh the flow field. Because the three-dimensional flow field calculation area is to be simulated, it is also necessary to make the operation as simple as possible in the premise of ensuring the accuracy. Therefore, a close-knit mesh is formed near the area around the probe. The grid, and relatively thin grids are divided in the area of ​​the straight pipe before and after to meet the calculation requirements. The mesh format unit used in this paper is Tet/Hybrid, and the specified format type is TGrid, which indicates that the specified mesh is mainly composed of a tetrahedral mesh, but may contain hexahedral, pyramidal, and wedge-shaped mesh cells in place. 3.3 Establish Discretization Equation This paper uses the most widely used finite volume method in engineering today to divide the computational area into a series of control volumes and integrate the differential equations for each control volume to obtain the discrete equations. Universal conservation equations for solving mass, momentum, energy, composition, etc. on these controllers Among them, the first item on the left is a transient item, the second item is a convection item, the first item on the right is a diffusion item, and the second item is a general source item. The φ in the equation is a generalized variable and can represent some physical quantities such as velocity, temperature, pressure, etc. to be solved. Γ is the generalized diffusion coefficient corresponding to φ. The boundary value of the variable φ at the endpoint is known. The SIMPLE algorithm is used in the control equation and belongs to the pressure correction method. The second-order upwind style is used to make the calculation result more accurate. 3.4 Determining Boundary Conditions Experiments were carried out under the conditions of normal temperature and pressure (20°C, 1 atm) as the influent fluid. The inlet boundary condition of the pipeline was set as the velocity inlet, and the boundary condition of the pipeline outlet was the pressure outlet. Select the following 8 speed points for simulation: 0.5m/s, 1.0m/s, 2.5m/s, 5m/s, 7.5m/s, 10m/s, 12.5m/s, 15m/s, observe the flow field Distribution, you can get the average flow rate of the signal collected. 4 Simulation results and calculations Through FLUENT simulation, it can be seen that due to the insertion of the probe, fluid flow around the probe, resulting in changes in the flow field within the pipeline, destroying the stability of the flow field, that is, this change leads to the input and output of the plug-in electromagnetic flowmeter. The linearity between signals decreases. At the same time, we can also get the average flow rate at different flow speeds in the range of 0.5m/s~15m/s.
This equipment takes the
power from chassis engine, with stable and environmental performance; It adopts
rotary paddle switch and CCD camera in the inner lifting double-hopper, which
can monitor and alarm the level of aggregates in the hopper to improve the
bearing capacity, stability and reliability. It can realize operation in
height-limit condition, such as bridges and culverts. It adopts camber chip
distributing device to improve the evenness. It uses stable dedicated
controller to control the whole electric system, rear high-definition infrared
cameras monitor the whole operation, which improve the working environment and
efficiency.
Rubber Synchronous Chip Sealer ( Rubber Synchronous Chip Sealer,Chip Seal,Chipping Machine,Chip Seal Paving Henan Gaoyuan Road Maintenance Equipment Co., Ltd. , https://www.sgroadmachinary.com (1)
(1) 
 (2)
(2)  Because the cross-sectional area of ​​the pipeline under test is known, it is easy to determine the volumetric flow of a conductive fluid.
Because the cross-sectional area of ​​the pipeline under test is known, it is easy to determine the volumetric flow of a conductive fluid. 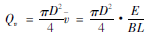 (3)
(3)  (4)
(4) 
 (5)
(5)  (6)
(6)  , kinetic energy
, kinetic energy  Dissipation rate
Dissipation rate  = 1.0, σε = 1.3.
= 1.0, σε = 1.3.  (7)
(7) 